پیزوالکتریک
اولین سایت تخصصی مواد پیزوالکتریک و کاربردهای آن به زبان فارسیپیزوالکتریک
اولین سایت تخصصی مواد پیزوالکتریک و کاربردهای آن به زبان فارسیدرباره من
 سلام
هدف از راه اندازی این وبلاگ بالا بردن سطح اطلاعات خودم و سایر عزیزانی است که در زمینه مواد فعال بویژه مواد پیزوالکتریک کار می کنند. پایان نامه ارشد من در رابطه با کاهش ارتعاشات سازه به کمک مواد پیزوالکتریک به صورت passive damping بود و حالا در زمینه active damping و همینطور energy harvesting
تحقیق میکنم.
ar.keshavarz@aut.ac.ir
ادامه...
سلام
هدف از راه اندازی این وبلاگ بالا بردن سطح اطلاعات خودم و سایر عزیزانی است که در زمینه مواد فعال بویژه مواد پیزوالکتریک کار می کنند. پایان نامه ارشد من در رابطه با کاهش ارتعاشات سازه به کمک مواد پیزوالکتریک به صورت passive damping بود و حالا در زمینه active damping و همینطور energy harvesting
تحقیق میکنم.
ar.keshavarz@aut.ac.ir
ادامه...
پیزوالکتریسیته
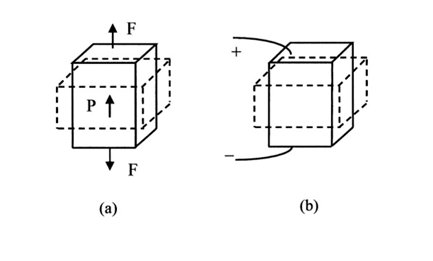
پیزوالکتریسیتی به پدیدهای الکترومکانیکی اطلاق می شود که در حالتِ جامدِ مواد، کوپلی بین خواص الکتریکی، مکانیکی و گرمایی از خود نشان می دهد و از قرار گرفتن کریستال های دی الکتریک تحت تنش های مکانیکی-گرمایی بوجود می آید. پیزو کلمه ای یونانی است که به معنی فشار می باشد. در سال 1880 برای اولین بار پدیده پیزوالکتریک توسط برادران کوری در فرانسه کشف شد. بر اساس گزارش برادران کوری ، این مواد هنگامی که تحت فشار مکانیکی(تنش یا کرنش) قرار گیرند شارژ الکتریکی تولید می نمایند(اثر مستقیم). و برعکس این حالت هنگامی که تحت میدان الکتریکی قرار گیرند، تنش یا کرنش مکانیکی تولید می کنند(اثر معکوس). این قابلیت دوگانه باعث می شود تا این ماده برای هردو کاربرد حس گر و محرک ایده آل باشد.
کنترل فعال و غیر فعال ارتعاشات بوسیله پیزوالکتریک
از جمله مزایای کنترل فعال ارتعاشات به کمک مواد پیزوالکتریک می توان به نیرومندی و انعطاف پذیر بودن سیستم، کارایی در باند فرکانسی وسیع، قابلیت کاهش ارتعاشات با مقادیر بالا، و عدم تاثیر پذیری سیستم کنترلی از شرایط محیطی و سازه اشاره داشت. با این حال، سیستم کنترلی فعال ارتعاشات بسیار پیچیده و الگوریتم پیشرفته ای نیازمند است، و در شرایطی ممکن است از حالت تعادل خارج شود که به تشدید در سازه منجر خواهد شد. علاوه بر این به منبع انرژی بزرگی نیز برای تحریک محرک ها نیازمند است. تحریک محرک های پیزوالکتریک مستلزم استفاده از ولتاژ متناوب بسیار بالا(نه لزوما جریان زیاد) برای ایجاد نیرو و جابجایی زیاد می باشد. شکل زیر نیروی ایجاد شده در مقابل جابجایی محرک پیزوالکتریک در ولتاژهای مختلف، نشان میدهد. بنابراین، بسیار مهم خواهد بود که یک منبع انرژی کارا و آمپلیفایرهای قدرتمند به منظور استفاده از محرک های پیزوالکتریک، طراحی گردد. بسیاری از سیستم های ارتعاشی باید به صورت کم حجم و کم مصرف(از نظر منبع تولید انرژی) باشند که با نحوه کار این سیستم ها همخوانی نخواهد داشت.

مروری بر کنترل ارتعاشات سازه های هوشمند
در همه تعریفات موجود از سازه های هوشمند بر دو مفهوم زنده بودن و هوش مصنوعی آنها اشاره شده است. مفهوم زنده بودن با توجه به این که این سازه ها دارای قدرت احساس(سنجش) و عمل(تحریک) هستند انتخاب شده است. هوش مصنوعی سازه های هوشمند به واسطه ی مدارهای الکتریکی می باشد که قدرت انتخاب عکس العمل مناسب نسبت به شرایط محیطی و تحریکات خارجی را به این سازه ها عطا می کند.
سازه هوشمند شامل مبدل هایی می باشد که دینامیک سازه را ثبت می نماید، اطلاعات بدست آمده را به مدارهای وابسته منتقل می نماید و دستورات دوباره به مبدل های جاسازی شده در سازه باز می گردد. نمونه ای از یک سازهی هوشمند در شکل زیر نمایش داده شده است.

استفاده از سیستم های فعال کنترل ارتعاشات در سازه هایی اعمال می شود که محدودیت وزن اجازه استفاده از دیگر سیستم ها را ندهد و همچنین محدوده ارتعاشاتی با فرکانس پایین مد نظر باشد.
همه ی سازه های هوشمند بر پایه ی مواد فعال(active material) می باشند. مواد فعال، به موادی اطلاق می شود که دارای خاصیت ایجاد کوپلینگ میان دو یا تعداد بیشتری میدان(میدانهای مکانیکی، الکتریکی، مغناطیسی، شیمیایی و نوری) می باشند. جدول زیر تعدادی از مواد فعال و کوپلینگ آنها را نشان میدهد.

بواسطه ی چنین قابلیتی، این مواد تحت تاثیرتحریکات خارجی متناسب، دچار تغییر شکل و خواص فیزیکی، هندسی و رئولوژیک خواهند شد. هر کدام از این مواد به نوبه ی خود بسیار حیرت آور و پر کاربرد خواهند بود اما طبق بررسی ها و آزمایشات صورت گرفته نقاط قوت و ضعف هر یک، در کاربردهای مختلف بررسی شده تا بهینه ترین ماده برای هدفی خاص انتخاب گردد.
کد متلب مدار شانت پیزوالکتریک
به درخواست یکی از بازدید کننده ها قسمتی از کد متلب نوشته شده برای مدار شانت پیزوالکتریک بر روی تیر رو گذاشتم. امید وارم به کمکتون بیاد.
کد نوشته شده در متلب
% PARALLEL R-L SHUNT OF HINGED-HINGED BEAM
% WRITTEN BY A.Keshavarz
% ar.keshavarz.aut.ac.ir
CLEAR
B=0.025; % BEAM & PZT WIDTH
L=0.5; % BEAM LENGTH
X1=0.095; % DISTANCE OF THE LEFT EDGE OF PZT
X2=0.155; % DISTANCE OF THE RIGHT EDGE OF PZT, (X2-X1) IS THE LENGTH OF PZT
XD=0.5*L; % POSITION OF FORCE APPLIED
EB=70E9; % YOUNG'S MODULUS OF BEAM
DB=2700; % DENSITY OF BEAM
HB=3E-3; % THICKNESS OF BEAM
EP=70E9; % YOUNG'S MODULUS OF PZT
DP=7600; % DENSITY OF PZT
HP=0.25E-3; % THICKNESS OF PZT
H31=7.65E8; % PZT CONSTANT
AB=B*HB; % AREA OF BEAM
AP=B*HP; % AREA OF PZT
ZB=HB/2; % CENTER LOCATION OF BEAM
ZP=HB+HP/2; % CENTER LOCATION OF PZT
ZN=(AB*EB*ZB+AP*EP*ZP)/(AB*EB+AP*EP); % NATURAL AXIS OF COMPOSITE BEAM
IB=B*HB^3/12+AB*(ZN-ZB)^2; % MOMENT OF INERTIA OF BEAM
IP=B*HP^3/12+AP*(ZN-ZP)^2; % MOMENT OF INERTIA OF PZT
N=3; % NO. OF FREQUENCIES
% INITIALIZE MATRIX
K=ZEROS(N);
M=ZEROS(N);
C=ZEROS(N);
BL=ZEROS(N,1);
BR=ZEROS(N,1);
FD=ZEROS(N,1);
CP=82E-9; % CAPACITANCE OF PZT
%L0=[400 4.788 1]; % SHUNT INDUCTORS
%R0=[3E5 1E4 1]; % SHUNT RESISTORS
L0=[500 24.64 4.846]; % SHUNT INDUCTORS
R0=[3.4E5 1E5 7E4]; % SHUNT RESISTORS
% COEFFICIENT OF BL
%BL=H31*(HB+0.5*HP)*(L0/R0)*(PI/L)*(COS(PI*X2/L)-COS(PI*X1/L));
% COEFFICIENT OF BR
%BR=H31*(HB+0.5*HP)*(PI/L)*(COS(PI*X2/L)-COS(PI*X1/L));
% COEFFICIENT OF BL
%BL=H31*(HP/(X2-X1))*(HB+0.5*HP)*(L0/R0)*(PI/L)*...
%(COS(PI*X2/L)-COS(PI*X1/L));
% COEFFICIENT OF BR
%BR=H31*(HP/(X2-X1))*(HB+0.5*HP)*(PI/L)*(COS(PI*X2/L)-COS(PI*X1/L));
CR=INV(DIAG(R0*CP)); % COEFFICIENT OF CR
CL=INV(DIAG(L0*CP)); % COEFFICIENT OF CL
FOR R=1:N;
Q1(R)=-(H31*HP*(HB+0.5*HP)*(R*PI/L)*ABS(COS(R*PI*X2/L)-...
COS(R*PI*X1/L)))/((X2-X1));
FOR S=1:N;
BL(S)=H31*(HP/(X2-X1))*(HB+0.5*HP)*(L0(S)/R0(S))*...
(S*PI/L)*(COS(PI*X2/L)-COS(PI*X1/L)); % COEFFICIENT OF BL
BR(S)=H31*(HP/(X2-X1))*(HB+0.5*HP)*(S*PI/L)*...
(COS(PI*X2/L)-COS(PI*X1/L)); % COEFFICIENT OF BR
IF R == S
K(R,S)=(PI*R/L)^4*(EB*IB*L/2+EP*IP*(X2-X1)/2+...
EP*IP*L/(4*PI*R)*(SIN(2*PI*R*X1/L)-SIN(2*PI*R*X2/L)));
M(R,S)=(DB*AB*L/2+DP*AP*(X2-X1)/2+DP*AP*L/...
(4*PI*R)*(SIN(2*PI*R*X1/L)-SIN(2*PI*R*X2/L)));
ELSE
K(R,S)=EP*IP*L/PI*(PI^2*R*S/L^2)^2*((R*SIN(S*PI*X2/L)...
*COS(R*PI*X2/L))/(S^2-R^2)+(S*SIN(R*PI*X2/L)*...
COS(S*PI*X2/L))/(R^2-S^2)-((R*SIN(S*PI*X1/L)*...
COS(R*PI*X1/L))/(S^2-R^2)+(S*SIN(R*PI*X1/L)*...
COS(S*PI*X1/L))/(R^2-S^2)));
M(R,S)=DP*AP*L/PI*((R*SIN(S*PI*X2/L)*COS(R*PI*X2/L))/...
(S^2-R^2)+(S*SIN(R*PI*X2/L)*COS(S*PI*X2/L))/(R^2-S^2)-...
((R*SIN(S*PI*X1/L)*COS(R*PI*X1/L))/(S^2-R^2)+...
(S*SIN(R*PI*X1/L)*COS(S*PI*X1/L))/(R^2-S^2)));
END;
END;
%FD(R)=1/100*SIN(R*PI*XD/L); % DUE TO DISCRETE FORCE WITH MAGNITUDE 1/100
END;
FD = (1/100)*[1; 1; 1]; % APPLIED FORCE
CD=0.2*M+1E-7*K; % INTERNAL DAMPING COEFFICIENT
Q=Q1*INV(DIAG(L0)); % Q1/L0
Q=DIAG(Q); % MAKE Q AS A DIAGONAL MATRIX
BL=DIAG(BL);
BR=DIAG(BR);
% STATE-SPACE MODEL
AK=-INV(M)*K; % -K/M
AC=-INV(M)*CD; % -C/M
% A MATRIX WITHOUT SHUNT
A1=[ZEROS(N) EYE(N) ZEROS(N) ZEROS(N); AK AC ZEROS(N) ZEROS(N); ...
ZEROS(N) ZEROS(N) ZEROS(N) EYE(N); -Q ZEROS(N) -CL -CR];
% A MATRIX WITH SHUNT
A2=[ZEROS(N) EYE(N) ZEROS(N) ZEROS(N); AK AC -INV(M)*BR -INV(M)*BL; ...
ZEROS(N) ZEROS(N) ZEROS(N) EYE(N); -Q ZEROS(N) -CL -CR];
B=[ZEROS(N,1); INV(M)*FD; ZEROS(N,1); ZEROS(N,1)];
FOR R=1:N;
C1(1,R)=SIN(R*PI/4); % DISPLACEMENT W AT MIDPOINT (X=L/2)
END;
C=[C1 ZEROS(1,3*N)];
D=[0];
% IMPULSE RESPONSE
T=LINSPACE(0,1,1E5);
IU=1;
[Y,X,T]=IMPULSE(A1,B,C,D,IU,T); % UNCONTROLLED RESPONSE
[YC,X,T]=IMPULSE(A2,B,C,D,IU,T); % CONTROLLED RESPONSE
FIGURE(1);
PLOT(T,Y,'B--',T,YC,'R') % UNIT (MM)
LEGEND('WITHOUT PZT SHUNT','WITH PZT SHUNT');
TITLE('IMPULSE RESPONSE OF BEAM TRANSVERSE DISPLACEMENT AT XM=L/4', 'FONTSIZE', 18, 'COLOR', 'R')
XLABEL('TIME (SEC)', 'FONTSIZE', 16, 'COLOR', 'R')
YLABEL('DISPLACEMENT (M)', 'FONTSIZE', 16, 'COLOR', 'R')
AXIS([0 1 -1E-3 1E-3])
GRID;
ZOOM ON;
FIGURE(2);
PLOT(20*LOG10(ABS(FFT(Y))),'B--');
HOLD ON;
PLOT(20*LOG10(ABS(FFT(YC))), 'R');
LEGEND('WITHOUT PZT SHUNT','WITH PZT SHUNT');
TITLE('FREQUENCY RESPONSE OF BEAM TRANSVERSE DISPLACEMENT AT XM=L/4','FONTSIZE', 20, 'COLOR', 'R');
XLABEL('FREQUENCY (HZ)', 'FONTSIZE', 16, 'COLOR', 'R');
YLABEL('MAGNITUDE (DB)', 'FONTSIZE', 16, 'COLOR', 'R');
AXIS([0 1000 -80 40]);
GRID;
ZOOM ON;
HOLD OFF;
پاسخ جابجایی تیر با و بدون وصله پیزوالکتریک با کمک کد متلب

پاسخ فرکانسی جابجایی عرضی تیر با وصله پیزوالکتریک متصل به وسط آن، در نقطه ی xm=L/4

پاسخ جابجایی عرضی تیر با وصله پیزوالکتریک متصل به وسط آن، در نقطه ی xm=L/4 .