پیزوالکتریک
اولین سایت تخصصی مواد پیزوالکتریک و کاربردهای آن به زبان فارسیپیزوالکتریک
اولین سایت تخصصی مواد پیزوالکتریک و کاربردهای آن به زبان فارسیدرباره من
 سلام
هدف از راه اندازی این وبلاگ بالا بردن سطح اطلاعات خودم و سایر عزیزانی است که در زمینه مواد فعال بویژه مواد پیزوالکتریک کار می کنند. پایان نامه ارشد من در رابطه با کاهش ارتعاشات سازه به کمک مواد پیزوالکتریک به صورت passive damping بود و حالا در زمینه active damping و همینطور energy harvesting
تحقیق میکنم.
ar.keshavarz@aut.ac.ir
ادامه...
سلام
هدف از راه اندازی این وبلاگ بالا بردن سطح اطلاعات خودم و سایر عزیزانی است که در زمینه مواد فعال بویژه مواد پیزوالکتریک کار می کنند. پایان نامه ارشد من در رابطه با کاهش ارتعاشات سازه به کمک مواد پیزوالکتریک به صورت passive damping بود و حالا در زمینه active damping و همینطور energy harvesting
تحقیق میکنم.
ar.keshavarz@aut.ac.ir
ادامه...
مدل ساختاری مواد پیزوالکتریک
با تلفیق انرژی پتانسیل
الکتریکی و بسط انرژی کرنشی، انرژی
پتانسیل کل برای ماده ی پیزوالکتریک بدست می آید، که میتوان از آن، به معادلات
ساختاری پیزوالکتریک دست یافت.


توضیحات بیشتر را در ادامه مطلب بخوانید.
ادامه مطلب ...
دستهبندی سیستم های کنترلی ارتعاشات
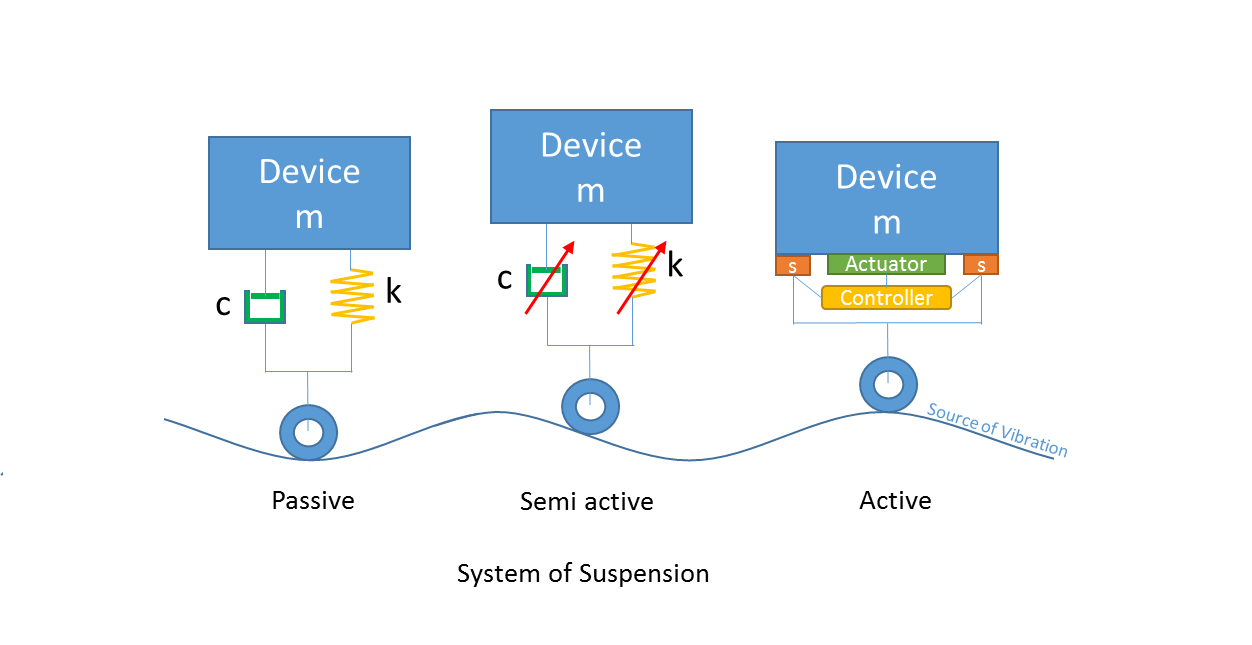
مفهوم کنترل ارتعاش
در برخورد با یک سیستم ارتعاشی،
لازم است با دو مفهومِ عدم قطعیت(uncertainties) و استراتژی
کنترل، آشنا بود. عدم قطعیت مستقل از سیستم مد نظر، به معنای مشخص نبودن
پارامترهای آن سیستم می باشد. کنترل نیز به مدیریت و تغییر رفتار فرایند یا سیستم
به نحو مورد نظر، اطلاق می شود.
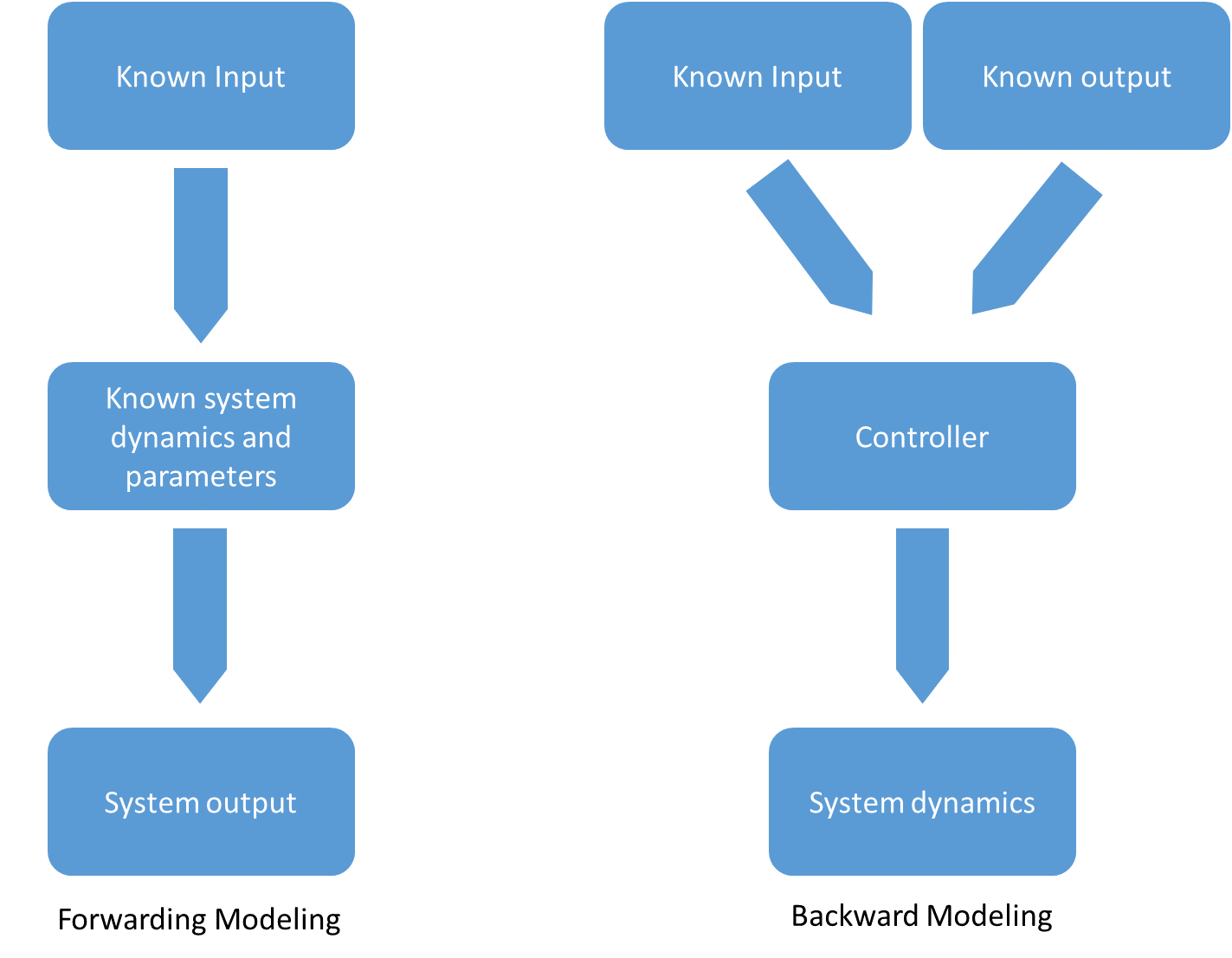
دو سناریو برای مدل
سیستم دینامیکی به صورت شماتیک، به نمایش در آمده است. سناریوی اول مدلسازی رو به
جلو(forward modeling) می باشد
که در آن تحریکات و عوامل موثر بر سازه، ثابت و قابل اندازهگیری است و سپس با
توجه به مشخصات سیستم اندازهگیری است و سپس با توجه به مشخصات سیستم، که معلوم می باشند،
میتوان خروجی را به دست آورد.
پیزوالکتریک چیست؟
پیزوالکتریک چیست؟
موادی مانند ترکیبات سرب، زیرکنات، تیتانات و کوارتز که در ساختار کریستال آنها تقارن مرکزی وجود ندارد؛ قادرند کوپلی قوی میان میدان مکانیکی و الکتریکی ایجاد نمایند. بدین نحو که در اثر اعمال تنش بر آنها، قادرند جریان الکتریسیته تولید نموده و در اثر اعمال میدان الکتریکی تحت کرنش قرار خواهند گرفت. هنگامی که بلور تحت تأثیر فشار مکانیکی قرار گیرد، قطب مثبت در یک وجه بلورهای نارسانا و قطب منفی نیز در وجه مخالف آن ایجاد میگردد.
یک ماده پیزوالکتریک دارای یک دمای کوری ویژه (Curie temperature) است. در اثر گرم شدن ماده تا بالای این دما، دو قطبی ها می توانند جهت خود را در ماده ی فاز جامد تغییر دهند. سپس با ایجاد یک میدان الکتریکی قوی میتوان جهت دو قطبی ها را با میدان اعمالی هم جهت نمود. حال اگر سرامیک در حالتی که میدان قطبی کننده ثابت نگه داشته شده باشد، تا پایین دمای کوری سرد شود. نتیجه آن، ثابت ماندن دائم مسیر دو قطبی ها است و بعد از آن گفته می شود که ماده قطبی شده است. وقتی سرامیک های قطبی شده تا زیر دمای کوری خود سرد شدند و تحت یک میدان الکتریکی ضعیف قرار گرفتند(در مقایسه با میدانی که برای قطبی شدن استفاده شد)، پاسخ مجموعه دو قطبی ها یک انبساط ماکروسکوپی در طول محور قطبی و یک انقباض عمود بر آن می باشد(و یامعکوس آن با تغییر علامت میدان اعمال شده اتفاق می افتد).
دمای کاری پیزوالکتریک ها اغلب زیر دمای کوری است. اگر ماده تا بالای دمای کوری گرم شود، وقتی که میدان الکتریکی اعمال نشده باشد، دو قطبی ها به جهات تصادفی خود بر می گردند. در دماهای پایین نیز، اعمال یک میدان بسیار قوی می تواند باعث شود، دو قطبی ها از مسیری که طی قطبی شدن به عنوان مسیر پایدار ترجیح داده بودند، خارج شوند. مواد پیزوالکتریک بعد از خارج شدن از حالت قطبی، خواص پاسخ ابعادی را به میدان الکتریکی از دست می دهند. دمای کوری بسته به نوع پیزوالکتریک، در حدود 200 الی 300 درجه می باشد.
مواد پیزوالکتریک تحت شرایط خاص همانند، اعمال میدان الکتریکی بسیار قوی در جهت مخالف با دو قطبیشان، اعمال تنش مکانیکی شدید در اثر انحراف از محور دو قطبیشان و یا حرارت دادن بیش از دمای کوری، ممکن است اثر خود را از دست بدهند. در اغلب شرایط کاری، سعی می شود که دمای محیط کاری پیزوسرامیکها کمتر از نصف دمای کوری باشد تا از آسیب کلی به آنها جلوگیری شود.
خاصیت پیزوالکتریک، پدیدهای کریستالی است و مرتبط با چیدمان پیچیده ای است؛ به نحوی که در مواد با چیدمان معمولی یا تصادفی وجود ندارد. این خاصیت وابسته به ساختار کریستال می باشد. خاصیت پیزوالکتریسیتی یک پدیده متقابل تبدیل انرژی از یک نوع(الاستیک) خود به دیگری(الکتریکی) است. این در حالیست که مواد غیر متبلور(آمورف Amorphous)، برخلاف انتظار هیچ اثر الکتریکی بر اثر فشار از خود نشان نمی دهند.
انواع استراتژی های کاهش ارتعاش
مترادف با عبارت کنترل ارتعاش، عباراتی همانند عایق نمودن ارتعاشات و جذب ارتعاشات نیز استفاده می شود؛ اما در اصل هر کدام دارای مفهومی متفاوت می باشد. همان طور که در شکل مشاهده میشود، سه نوع سیستم برای کاهش ارتعاشات وجود دارد.
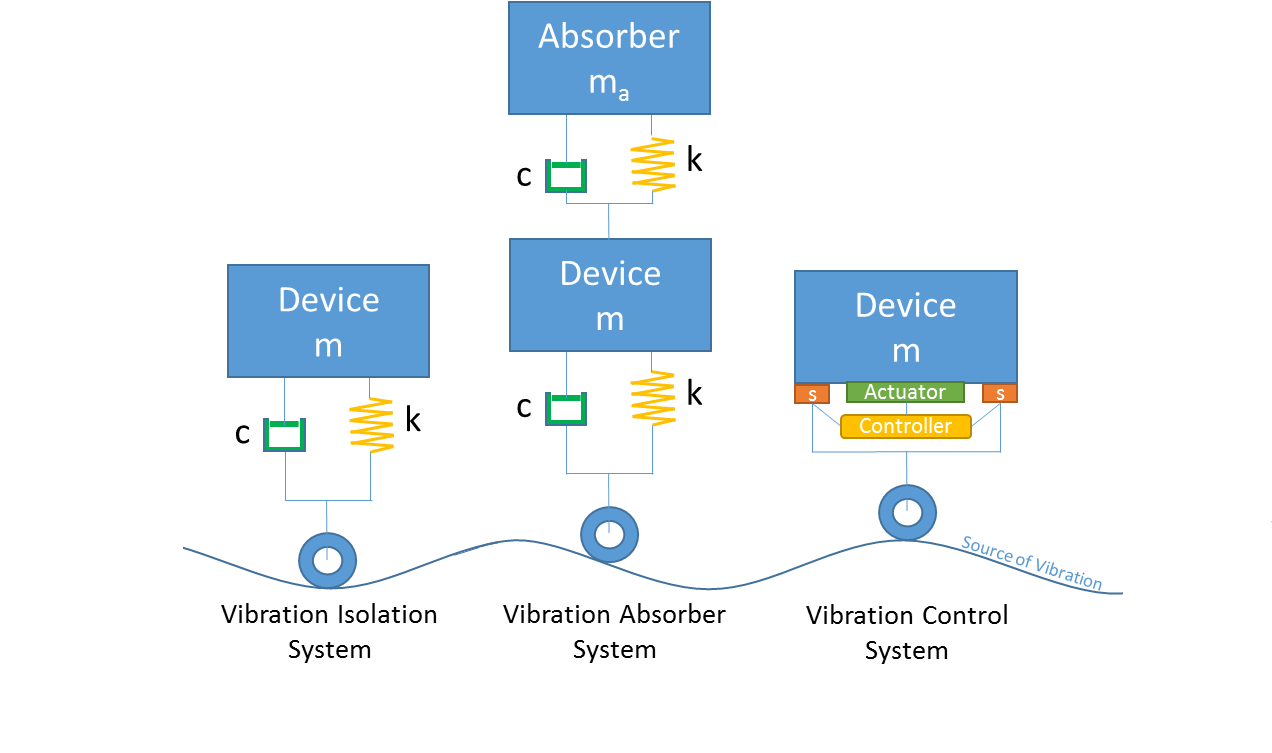
در سیستم های عایق ارتعاشات، منبع ارتعاش به گونهای از جرم مد نظر جدا شده است و به عبارتی، سیستم نسبت به ارتعاش عایق شده است. این سیستم از اجزای بسیار ساده و ابتدایی برای کاهش ارتعاشات استفاده می نماید و به همین دلیل هزینه ی استفاده از این سیستم بسیار اندک می باشد.
در سیستم های جاذب ارتعاشات یک سیستم ثانویه، برای کاهش ارتعاشات سیستم اصلی، مورد استفاده قرار می گیرد. با انتخاب درست جرم، سفتی و میرایی مورد نیاز، ارتعاشات سیستم اولیه به حداقل خواهد رسید. در سیستم های جاذب ارتعاشات، سیستم دوم به منظور تقلیل انرژی وارده و انتقال آن به اجزای دیگر یا تبدیل آن به گرما اضافه شده است.
در
سیستم های کنترل ارتعاشات، نیروها و گشتاورها به نحوی به سیستم اعمال می شوند که،
سیستم به طور همزمان ارتعاشات گذرا را سرکوب نماید و آن را تا حد مورد نظر کاهش
دهد. مشکلات این کنترلرها چالش برانگیزتر می باشد به این دلیل که علاوه بر اینکه
بایستی به هدف کنترل حرکات دست یابیم، باید ثبات سیستم در مواجهه با ارتعاشات گذرا
تأمین شود.